






Product.
ADS-YC-BEV 多模态融合场桥大车三合一系统
该系统实现轮胎吊的自动行走、抵达目标位置自动停车和智能防撞功能,并适应码头堆场复杂的道路环境。
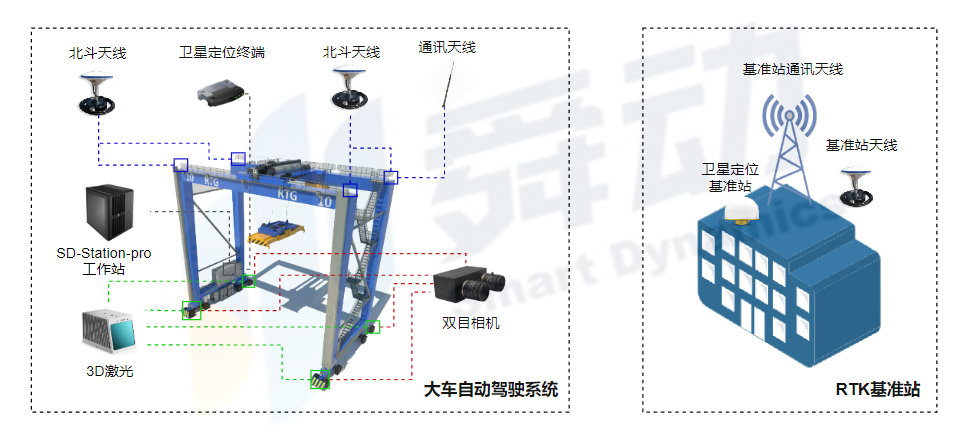
北斗高精度定位技术和3D激光、工业双目相机相结合,多传感器融合技术,每个传感器提供更多功能,实现设备复用,功能冗余相互校验。给客户带来更高的安全性、可靠性和更低的获得成本。
利用北斗卫星定位与3D激光进行冗余大车定位,确保轮胎吊能精确行驶到目标位置;
利用北斗卫星定位与视觉冗余感知轮胎吊在车道线偏斜位置,从而精确控制轮胎吊在车道线中心位置直线行驶;
双目相机与3D激光相互冗余检测轮胎吊行驶路线上的障碍物信息,确保大车行驶过程中绝对的安全防护。
我们的优势
系统价值
(1)实时高精度定位:基于北斗定位RTK技术提供厘米级的场桥中心点的实时位置。
(2)方向检测:实时获得大车前进方向与车道中心线的偏角。
(3)大车自动纠偏:根据大车位置、行驶偏角情况调整大车两侧轮速,确保大车保持直线行驶,并始终处于车道线中心位置。
(4)偏离报警:当轮胎吊偏离车道中心线超出预定值时发出报警。
(5)大车智能防撞:实时检测周边障碍物,当障碍物处于减速或停止区域,系统控制PLC进行减速和急停操作。
(6)精准停车:根据指令要求,当轮胎吊即将抵达作业目标位之前,系统发出逐步降速指令,最终控制大车精准停车。
(7)轨迹记录:将定位、方向、轨迹以及系统是否正常运行等数据记录保存,供用户随时查阅。 (8)系统自检:当系统或设备出现故障时,系统可以独立完成自检,并向控制系统上报。 适用场 景:场桥、岸桥、流机等。
适用场景:场桥以及岸桥
系统主要功能
多传感器复用冗余的轮胎吊大车行驶方案:
多传感器相互冗余,确保轮胎吊移动过程中的:纠偏、停车、避障,每个功能都有两种不同原理的传感器相互校验,大大提升了全自动化轮胎吊的安全等级。
传感器复用,降低获得成本:
本系统的北斗定位模块提供大车定位和轮胎吊姿态检测功能,3D激光提供大车定位及障碍物检测,双目相机提供轮胎吊在车道线的偏移检测及障碍物检测。每个传感器提供的两种复用功能,相较于独立采购,提高系统稳定性的同时,大大的降低了客户的获得成本。
系统概述
系统原理
· 定位精度:1cm+1ppm;
· 行驶偏角检测精度:0.5°;
· 纠偏控制精度:±5cm;
· 停车控制精度:±3cm;
· 防撞检测距离:≤100m;
· 超出车道报警:15m;
· 基站通讯链路:支持4G、5G以及数字电台;
· PLC支持:西门子、ABB、安川、富士等所有品牌;
· 工作温度:-40℃~65℃;
· 湿度:100%(无凝结);
· 系统防护等级:IP66(室外);
技术指标