

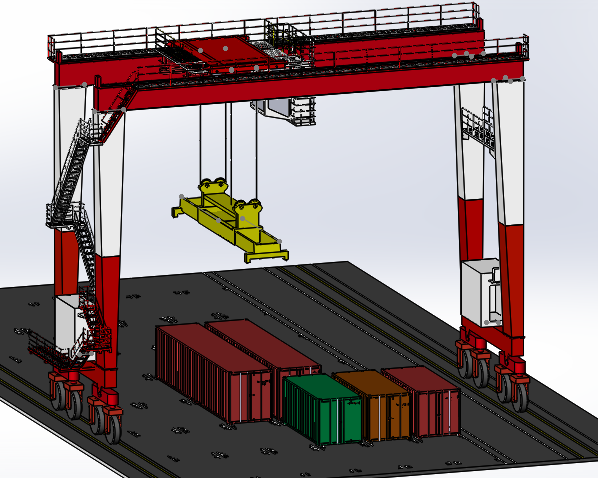
轮胎吊全自动化改造
本项目对中国北方地区沿海码头的四绳轮胎式场桥进行设计、部署、安装全自动化控制系统。
首次以全北斗定位技术作为轮胎吊的主要定位手段;
首次以机器人操作系统打造智能自主执行作业指令的全新自动化轮吊;
首次在不借助防摇钢丝绳的情况下,应用强化学习(RL)与深度学习(DL)的人工智能技术,以模仿轮胎吊司机操作习惯的方式,实现四绳吊具的自主装卸箱动作;
帮助码头实现了四绳轮胎吊全自动化作业的目标,且作业箱量,可达20Box/h。

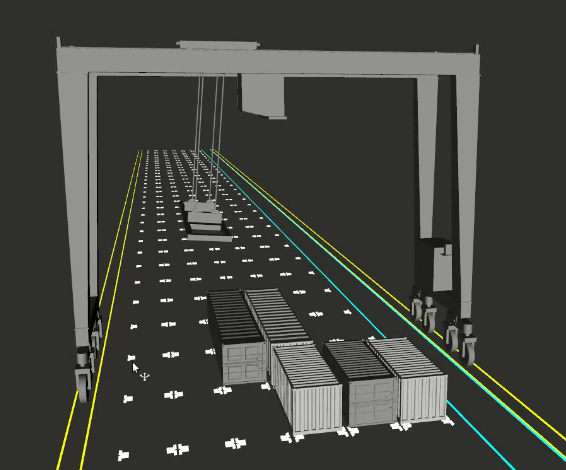
本项目对中国北方地区沿海码头的四绳轮胎式场桥进行设计、部署、安装全自动化控制系统。
首次以全北斗定位技术作为轮胎吊的主要定位手段;
首次以机器人操作系统打造智能自主执行作业指令的全新自动化轮吊;
首次在不借助防摇钢丝绳的情况下,应用强化学习(RL)与深度学习(DL)的人工智能技术,以模仿轮胎吊司机操作习惯的方式,实现四绳吊具的自主装卸箱动作;
帮助码头实现了四绳轮胎吊全自动化作业的目标,且作业箱量,可达20Box/h。